Arctic Fox - Capstone Project AERO 490
In 2019, the aerospace senior students has received a Request for Proposal (RFP) from the NSERC Chair in Aerospace Design Engineering (NCADE). The mandate is to develop a conceptual design for a new aircraft.

The successful introduction of UAVs in the aviation industry depends on three main efforts. First, technology needs to be developed to enable the safe and efficient operation of the vehicle during a mission. Second, infrastructure needs to be in place to allow the operation of the vehicle. Third, a regulatory environment and proper regulations must be implemented to allow both manned both manned and unmanned air vehicles to share common airspace.
Given that these obstacles must be resolved prior to introducing UAVs, we have decided that the best approach to leading the fleet in Canada’s UAV market is to design an optionally-piloted cargo aircraft for deployment in Canada’s North. The aircraft will be introduced into existing infrastructure and regulatory environments so that the safety of thetechnology can be evaluated.

Market Analysis
Weather conditions and insufficient infrastructure in Northern Canada cause infrequentdeliveries and shortages of fresh produce as 75% of cargo transport to the region is done byair [1]. According to a 2016 - 2017 Nutrition North Canada (NNC) report, 54% of remotecommunities lack access to fresh produce as defined by Health Canada [2]. In a bid tomitigate this issue, the government of Canada established the NNC subsidy program. TheNNC subsidy program is provided to suppliers and retailers that apply. The businesses mustthen pass the full subsidies received to the consumers. These subsidies are applied againstthe total cost of any product shipped by air to the eligible communities. This includescosts that accrue from “product purchasing, transportation, insurance and overhead” [3].The program allows food suppliers and retailers to shift a portion of the cost to the federalgovernment thereby lowering the cost to the final consumers. According to an NNC advisoryboard report in 2014, since the program was launched, demand for fresh produce increased[4]. This, in turn, increased flight hours of cargo operators to the North.
The OEM‘s short-term profitability is sacrificed to develop a new technology that will beextended in future applications, which will then lead to long-term profit. However, to justifythe OEM‘s development and production costs, the aircraft must outperform the currentaircraft operating in the North while remaining profitable and sellable.
An analysis of the disparities in transport infrastructure between the different provincesproves that not all of the regions in Canada’s North are suitable for operation. For instance,while communities in Yukon and Nunavut were found to have existing and growing transport infrastructure that provide year-round access by air and land, about 20 communities in theNorthwest Territories have no year-round access by land and air. Ultimately, the Nunavikregion is a prime location to establish a hub operation as it boasts a robust transport infras-tructure as well as year-round access by water, land and air.
Business Case
Air transportation in the Canadian North is divided into two main business models: hub-to-hub and hub-to-point. The hub-to-hub aircraft model strategy is to bring a bigger payload from a southern hub to a northern hub and is usually completed with large turbofan-poweredaircraft such as Boeing 737s. The hub-to-point strategy is to redistribute smaller payloadfrom a Northern hub to a point (remote community) and is usually accomplished with ATR-42 - a medium turboprop aircraft.
The figure below represent both North Canada air transportationmodel, starting from Montreal to Iqaluit, and then Iqaluit to remote communities.
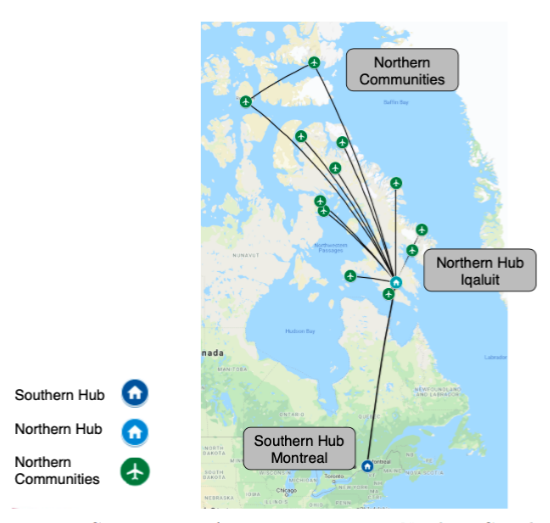
Rankin Inlet, Iqaluit, Kuujjuaq, Cambridge Bay and Yellowknife are the five main North-ern hubs serving the targeted market communities. Therefore, critical missions were estab-lished from these Northern hubs. They serve to define Arctic Fox’s operating boundaries andlimitations in term of its critical performance and lead the aircraft sizing exercise. Routelimitations were established when the aircraft is operating at maximum payload capacitywith a lower amount of fuel needed (maximum zero fuel weight or MZFW), when operatingat maximum takeoff weight (MTOW) reaching a far community and trading payload for fuel,and when operating at maximum fuel weight and removing payload to reach the community.
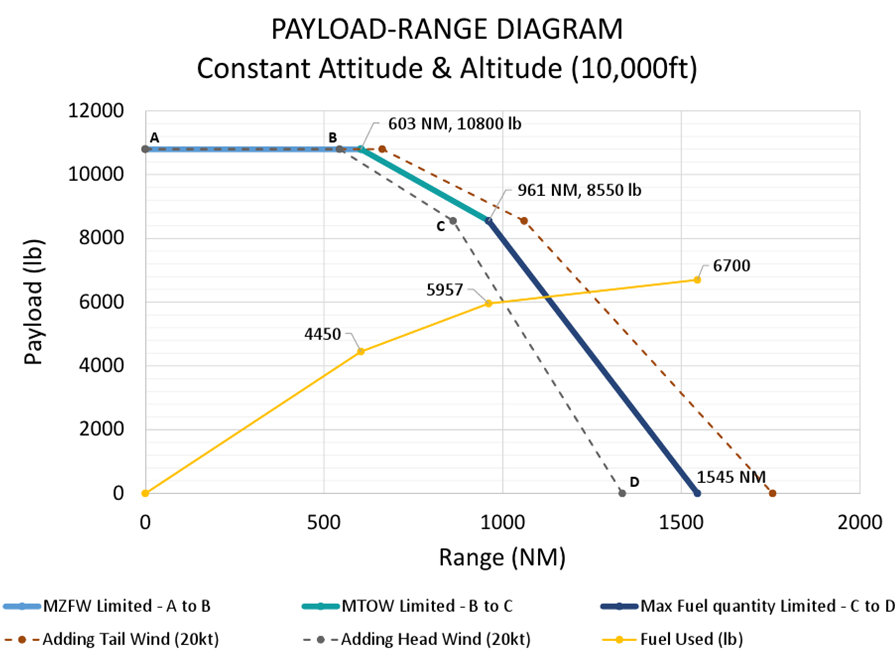
As seen in the picture above. A payload-range diagram was then constructed and a maximum payload of 10,800 lb was found and a maximum range of 1170 nautical miles.
PRELIMINARY DESIGN AND V&V
Aircraft Performance
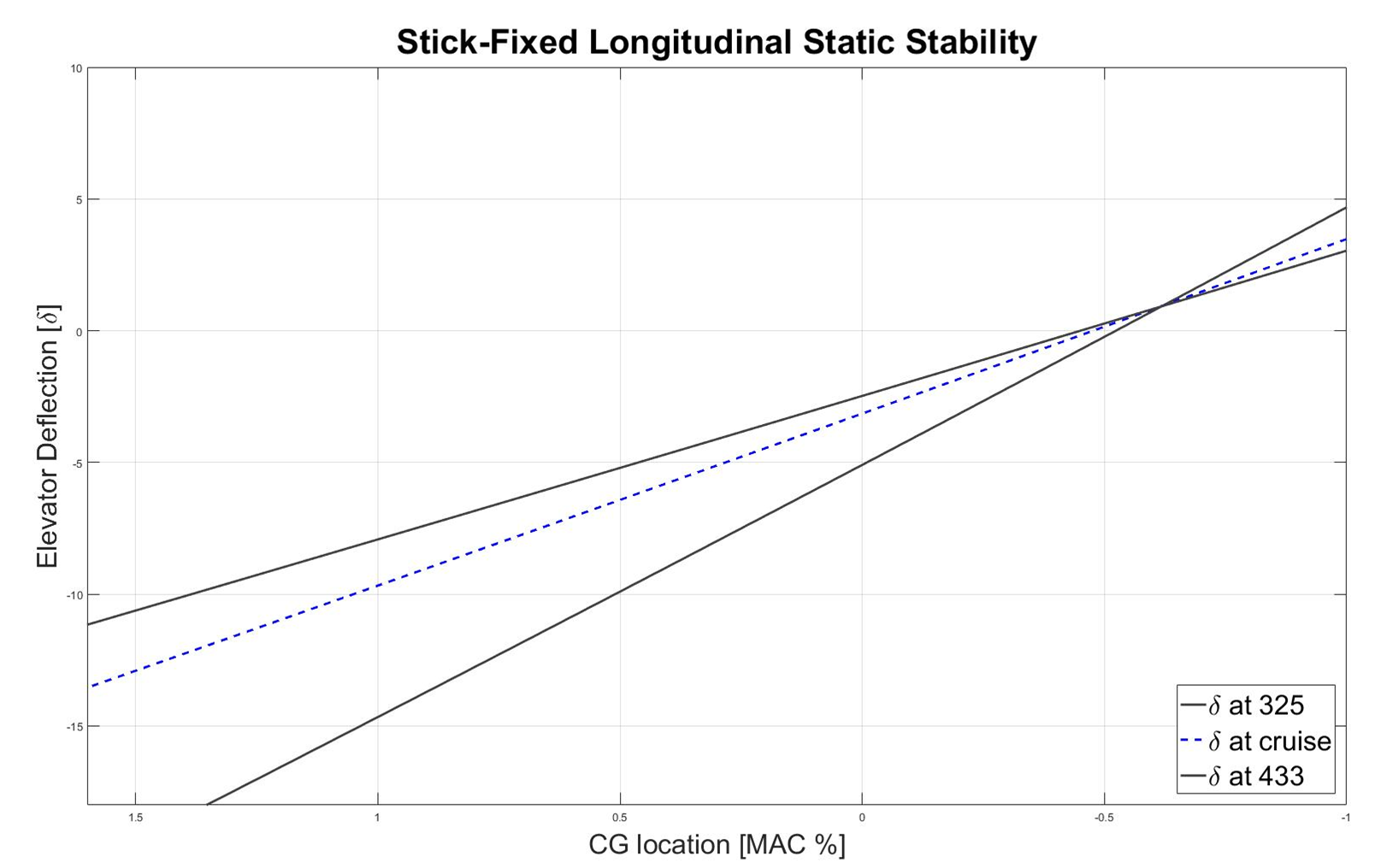
The positions and weights of components resulted in a most aft CG of 69.25%MAC from the wing leading edge when flying with maximum payload and minimum fuel,while the most forward CG is at 41.06% MAC when flying with one full pallet of cargo in themost forward position and minimum fuel. In order to avoid instability during cargo loadingand unloading, the main landing gears were positioned behind the most aft CG on ground, which was calculated to be 86.79% MAC. The range of flight CG limits falls within the longitudinal CG envelopeand the landing gear limits.
Using knowledge from AERO 446-Aerospace Vehicle Performance . From the MTOW of 38,405 lb, the balanced field length (BFL) of the aircraft at sea level and standard atmosphere on a gravel runway is 2,536 feet. Furthermore, the factored landing distance (FLD) of the aircraft at sea level and standardatmosphere on a gravel runway increased to 2,357 feet.
In order to determine the balanced field length (BFL), the speeds and distances mustbe computed for the OEI takeoff and the AEO ASD and V1 must be found at which bothdistances will be equal. This distance is known as the BFL. Each case is separated into multiple segments as shown figures below.
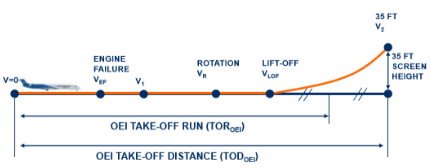
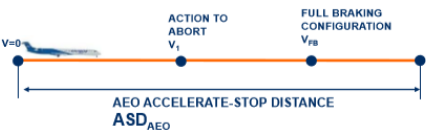
Using regulations from FAR 25.105 to 115 , the lift and drag of the Arctic Fox, and the acceleration equation. Each segment’s is acceleration, speed, time and distance is calculated. This enables the determination of the the total distance corresponding to a certain value of V1(ranging between 80% and 100% of VR). Thedetermination of the distance for the segments between VR,VLOF and V2 was done using the OEI gradient at V2 using the equation below.
While V2 was found using the following.
Stability - Cruise Condition
The handling qualities associated with the dynamic stability behaviour of the Arctic Foxwere assessed to complement the stability study from the conceptual design phase. The longitudinal dynamic stability of the aircraft was estimated from [5]. This proposed approximate method relates the physical layout of the plane to its handling qualities. In other words, the Arctic Fox‘s physical layout is translated into a state-space motion matrix which is then solved using the approximate method and a MATLAB toolset. The latter method allows the obtention of the undamped natural frequency and the damping ratio of the Arctic Fox. In turn, the handling qualities of the short and long periodmay be assessed. The results are as shown below.

The two CG cases represents the top of climb and top of descent scenario of the flight.
More details can be found in the report
Sources:
[1] “Canada’s northern food subsidy nutrition north canada: a comprehensive programevaluation,” 2016. [Online]. Available: https://www.tandfonline.com/doi/full/10.1080/22423982.2017.1279451
[2] “2016-2017: Full fiscal year,” Government of Canada, Apr. 2018. [Online]. Available:http://www.nutritionnorthcanada.gc.ca/eng/1524237277832/1524237310943
[3] “How nutrition north canada works,” 2018. [Online]. Available:https://www.nutritionnorthcanada.gc.ca/eng/1415538638170/1415538670874
[4] “Nutrition north canada advisory board second report,” 2014. [Online]. Available:https://www.nutritionnorthcanada.gc.ca/eng/1508938932551/1508938956924
[5] F. Stability and A. Control,Second Edition. McGraw - Hill, 1998.